| Name of the Project | Amount Sanctioned | Team Members |
|---|---|---|
| Robotic arm controlled by ROS(Robot Operating System) | 1,500/- | Mr. Yash Waman- Student TE R & A Engineering |
| Mr. Krushna Tathe - Student SE R & A Engineering | ||
| Mr. Akshay Raut - Student SE R & A Engineering | ||
| Mr. Kartik Dolaskar - Student SE R & A Engineering | ||
| Mr. Mahesh Shirke- Student SE R & A Engineering | ||
| Mr. Aryan Sutar- Student SE R & A Engineering | ||
| Prof. Yogesh Ingole- Faculty Coordinator |
About Project
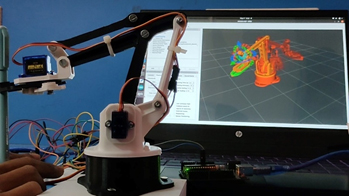
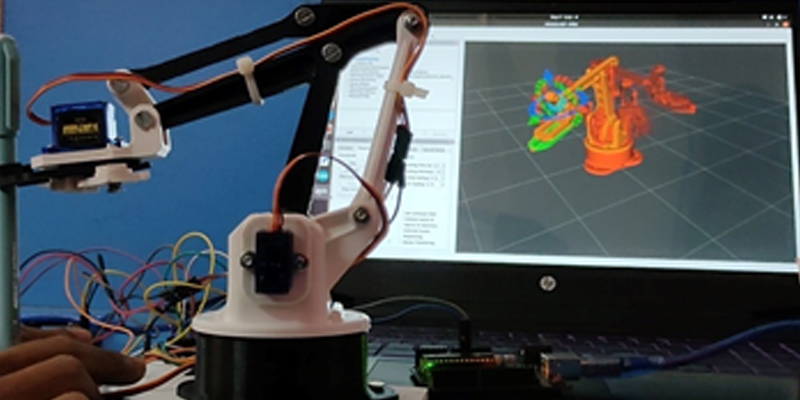
A Robotic Arm is a mechanical device designed to imitate and perform the function of a human arm. It typically involves a combination of mechanical, electrical components and actuators that work together to manipulate objects or perform a specific task. this robotic arm is having 3 degrees of freedom or axes of movement. Each axis represents a specific direction in which the arm can move, providing flexibility and versatility in performing tasks. The three axes are typically referred to as the base rotation, shoulder rotation, and elbow rotation.
Summary
- This project has used 4 servo motors which are SG90 for base shoulder elbow and actuation of gripper respectively
- The electrical module used in Robotic Arm was an Arduino Uno which has ATmega328P as microchip on it. It also has 5v additional power supply to power servo motors.
- The Arduino code has ROS library so that it is possible to interface Robot Operating System. With the help of move it we were able to simulate and control the robotic arm.
- As this being just the prototype we have plans for development and building this robotic arm at a much bigger scale